
D’un petit pas pour les techniciens, il faut peut-être attendre un grand bond en avant pour l’humanité. En adoptant les technologies HPC puis en parallélisant ses applications terrestres et embarquées, le Jet Propulsion Laboratory de la NASA n’a jamais été plus proches des premières traces de vie martiennes.
Joscelyn Flores
L’exploration de Mars a repris en 2004, avec l’envoi par la NASA de rovers (sondes mobiles) chargés de parcourir sa surface pour atteindre quatre objectifs : déterminer si la vie a pu exister sur la planète, caractériser son climat, analyser sa géologie et préparer son exploration, à terme, par l’homme. Dotés jusqu’à l’extrême de capteurs et d’instruments de recherche, ces rovers ont pour mission de renvoyer des données en continu. A charge ensuite, pour le Jet Propulsion Laboratory (JPL) de CalTech, de les traiter et de les transformer en connaissances acquises.
Compte tenu de la distance qui sépare Mars de la Terre, il a fallu surmonter de nombreux obstacles pour assurer la transmission des données topographiques, piloter les rovers et trouver un moyen de naviguer visuellement dans cette sorte de Big Data. L’adoption, en cours de programme, de technologies issues du GPU Computing a permis d’améliorer à la fois la quantité de données et la qualité de leur visualisation en aval. Avec, au fil des années, une rapidité de traitement presque décuplée, débouchant sur une précision des relevés encore jamais atteinte. Et l’on n’en est encore qu’aux tout débuts si l’on considère que l’explosion de la puissance de calcul se combine à la parallélisation croissante des applications.
Un traitement accéléré par le GPU Computing
Dixit Brendan Babb, mathématicien à l’Université d’Alaska (qui assiste le JPL), “le recours à l’accélération s’est révélé déterminant à toutes les étapes du traitement des données. D’abord, les informations ont pu être fortement compressées en amont afin de réduire les transmissions au minimum. Ensuite, lorsque les données sont réceptionnées sur Terre, elles sont reconstituées puis, s’agissant d’images, retraitées dans le sens de l’optimisation de leur qualité visuelle. Dans ce domaine, la parallélisation fait des merveilles.” Le développement, codé en MatLab et basé sur des algorithmes de compression par ondelettes, repose sur la couche Jacket (version 2.2) d’AccelerEyes. Jacket a ceci d’intéressant qu’elle parallélise les calculs vers CUDA sans quasiment qu’il faille toucher au code source, hormis quelques changements mineurs lors de la déclaration des types des variables.
Le recours à l’ensemble de ces outils est un facteur d’amélioration à la fois qualitative et quantitative. Par exemple, un des codes de traitement d’images utilise maintenant deux pixels adjacents plus un troisième, aléatoire, pour orienter la teinte de rendu. Il en résulte une correction d’environ 20 à 30 % (en moyenne) des aberrations chromatiques, qui optimise significativement la lisibilité des photos. Quantitativement, Brendan Babb précise que la programmation parallèle “a permis , en trois ans, de booster les performances des applicatifs d’un facteur trois à quatre – avec à nouveau un gain de temps du même ordre lorsque nous avons adopté la nouvelle génération d’accélérateurs.” Il estime par ailleurs que, une fois les développement affinés en profondeur avec en particulier l’utilisation d’instructions GPU natives, les performances de traitement d’images pourraient être multipliées par dix.
Une visualisation 3D pour un pilotage précis
Le traitement massivement parallèle des données captées par les objectifs stéréoscopiques de Curiosity permet également aux équipes de la NASA de reconstituer le relief environnant la sonde avec un niveau de précision satisfaisant. A partir de ces informations, les pilotes à distance sont capables de simuler les déplacements pour optimiser son parcours et, ce faisant, économiser ses précieuses ressources énergétiques. L’autonomie maximale du rover n’est en effet que de cent mètres par jour – pour un trajet quotidien moyen d’une quarantaine de mètres.

Ces déplacements successifs s’inscrivant dans un programme global de plus grande envergure, les ingénieurs et scientifiques au sol sont contraints de prendre en compte l’ensemble des informations transmises pour assurer un guidage sans heurt, condition indispensable à l’enchainement des étapes prévues. Pour la planification, les données sont traitées sur une station de travail qui recrée un relief réaliste en trois dimensions et l’affiche sur un moniteur stéréoscopique offrant une fréquence de balayage de 120Hz. Une paire de lunettes actives complète le dispositif : c’est grâce à elles que l’image tridimensionnelle peut être restituée.
Comme l’avoue Brian Cooper, responsable des développements nécessaires au pilotage des quatre rovers (Sojourner, Spirit, Opportunity et Curiosity), “avec un tel niveau de détail, auquel s’ajoute une texturisation précise du relief, ce pilotage virtuel s’apparente clairement à un jeu vidéo. Par rapport aux méthodes non virtuelles, le gain en précision comme en qualité de visualisation est déterminant“. Et pour cause : une fois ce parcours validé par l’équipe, il est directement transmis au rover pour exécution.
Outre les déplacements, il faut également piloter les bras et autres instruments de mesure qui équipent les rovers, en fonction des terrains explorés, de l’objectif de la journée et… des conditions immédiates dans lesquelles ils se trouvent. Ce dernier point peut d’ailleurs s’avérer crucial pour le succès de la mission. Avant le recours à l’accélération GPU, il n’était pas rare que l’un d’eux se coince au détour d’une roche ou d’un banc de sable. Le JPL ne disposait pas des capacités de traitement nécessaires pour faire vérifier visuellement au rover que les rotations des roues correspondaient bien à un déplacement physique. Un jour, avec Opportunity, il est arrivé qu’au lieu de progresser de plusieurs centaines mètres – distance établie en fonction du décompte des tours de roues – le rover ait en réalité fait du surplace en creusant un peu plus à chaque fois le trou qui le retenait prisonnier. Spirit aussi a connu pareille mésaventure, avec au passage quelques dégâts heureusement mineurs. Aujourd’hui, le traitement rapide de données en plus grande quantité permet la vérification réelle, désormais incluse dans les procédures standards. Ces expériences ont par ailleurs été intégrées au logiciel de Curiosity. S’il se trouve dans une situation identique, il est programmé pour s’immobiliser et attendre de nouvelles instructions.
La communication Mars-Terre : une affaire de précision
Avec un récepteur distant de 56 millions de kilomètres, la communication Terre-Mars est loin d’être instantanée. En fonction de la position des planètes, l’envoi et la réception peuvent durer de 4 à 24 minutes, avec une moyenne mesurée de 13 minutes et 48 secondes. Autant dire qu’avec une telle latence, toute instruction de déplacement ou de mouvement doit être scrupuleusement calculée puis répétée avant d’être expédiée.
Pour transmettre les données relevées, Curiosity a deux possibilités. Elle peut bien sûr émettre directement à partir de l’une de ses quatre antennes, à un débit compris entre 3 500 et 12 000 bits par seconde. Pour des raisons à la fois énergétiques et thermiques, la fenêtre de communication, période durant laquelle la Terre est atteignable en ligne droite, est alors limitée à 3 heures par jour. Seconde option, elle peut émettre en direction d’une sonde relais restée pour sa part en orbite. Cette sonde est visible sur une durée de huit minutes par révolution martienne, mais la communication offre alors un débit nettement plus élevé de 128 000 bits par seconde. De quoi transmettre 60 Mégabits de données par envoi, ce qui ne constitue guère que le dixième du contenu d’un CD.
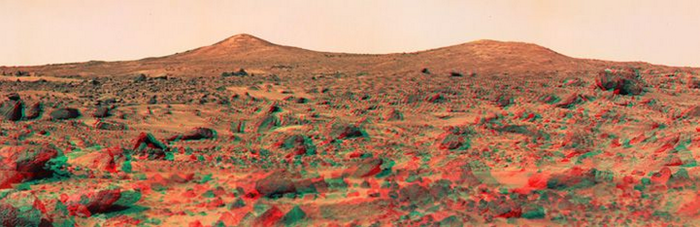
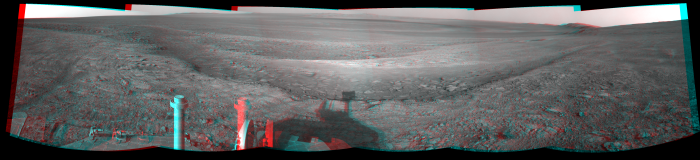
Visible de la terre 16 heures par jour, la sonde relais est équipée de deux antennes géantes de 34 et 70 mètres qui permettent d’envoyer et de recevoir en simultané et en haut débit. Ces niveaux de débits jouent un rôle majeur dans la mesure où la quantité d’informations transmise en continu par les sondes au sol est aujourd’hui assez conséquente, de l’ordre de 2 000 à 3 000 mesures par mètre parcouru. Là encore, l’accélération HPC s’avère déterminante, car elle permet de très fortement compresser les flux. Concrètement, les taux moyens obtenus par les développeurs du JPL atteignent voire dépassent 50 %. Avec de telle performances, les possibilités d’analyse du signal s’améliorent nettement, de sorte que les propriétés locales des images peuvent presque intégralement être prises en compte. Les résultats visuels s’en trouvent très significativement optimisés, comme le montrent les illustrations de ce dossier – les mêmes que celles avec lesquelles les scientifiques travaillent.
L’avenir, pour Brendan Babb, c’est la mise en production prochaine d’un calculateur Cray XK6m (baptisé Fish) doté de 48 accélérateurs Tesla Kepler. Grâce à lui, l’équipe et le public scientifique qui suit de près la mission devraient assister à une amélioration spectaculaire de la qualité des images, avec un niveau de précision qui, peut-être, permettra de déceler enfin les premières traces de vie martiennes.
Chroniques Martiennes
La NASA regroupe sur ce site les informations relatives à l’ensemble des missions martiennes confiées aux quatre rovers qui parcourent la surface de la planète en continu. Outre des photos et des vidéos composées de clichés successifs pris pendant leurs déplacements, le site offre un nombre impressionnant d’informations techniques sur tous les éléments composant Sojourner, Spirit, Opportunity et Curiosity.
Curiosity, dix labos en un

Curiosity est doté de dix instruments et capteurs dédiés à l’analyse des éléments constitutifs de la surface et de l’atmosphère de la planète rouge. ChemCam (Chemistry Camera), par exemple, permet notamment de décomposer par spectrométrie la lumière d’un plasma issu d’un tir laser émanant du rover et visant des roches avoisinantes, pour déterminer leur composition avec précision. Grâce au chromatographe en phase gazeuse intégré à l’ensemble d’instruments SAM (Sample Analysis of Mars), Curiosity est par ailleurs en mesure de réaliser in situ des analyses minérales et atmosphériques. L’objectif : identifier des isotopes de carbone et de gaz rares au sein des composés organiques issus de son environnement immédiat.
More around this topic...






© HPC Today 2024 - All rights reserved.
Thank you for reading HPC Today.






















{kind=link}